Python Projects Survey
| Pivot Angle [°] | Trail [cm] | Seat Height [cm] | BB-Seat Diff. [cm] | Ground Clearance [cm] | Wheelbase [cm] | Weight [kg] | BB-FWA [cm] | BB-EOS [cm] | Turning Circle [m] | Front Tubing [mm] | Wheel Size [inch] | CG [%] | |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| stokid | 57.5 | -17 | 28 | 25 | - | 178 | 18 | 49.5 | - | - | 30x10x1.5 | 20" 26" | - |
| Dirk | 60 | -14 | 28 | 20.5 | 21 | 111 | 14 | 49 | 74 | - | 30x10x1.5 | 20" 20" | - |
| Ghislain_1 | 60 | -14 | 29 | 20 | 22 | 100 | 13 | 46 | 75 | - | 30x10x1.5 | 20" 20" | - |
| Borm | 60 | -14 | 31 | 23 | 26 | 100 | 18 | 50 | 70 | - | 30x15x1.5 | 20" 20" | - |
| Ghislain_2 | 60 | -14.5 | 30 | - | - | 106 | 13 | - | - | - | 45x23x2.0 | 20" 20" | - |
| Nobuo | 60 | -16 | 20 | 17 | 4 | 115 | - | 40 | 63 | - | - | 16" 16" | - |
| Gavin | 60 | -17 | 28 | 12 | 7.6 | 88 | - | - | 67 | 4 | 25x13x1.5 | 16" 16" | - |
| Pajton | 60 | -17 | 30 | 28 | - | 95 | - | - | - | - | - | 20" 20" | - |
| Mike | 60 | -18 | 25 | 20.5 | 15.5 | 111.5 | 15 | 51.2 | 78 | - | 13x1 10x1 | 20" 20" | - |
| Martin | 60 | -20 | 32 | 8 | 8 | 110 | 15 | 36 | 67 | - | 13x1 20x1 | 20" 20" | - |
| Jukka_1 | 60 | -25 | 30 | 10 | - | 130 | 17 | - | - | 4.5 | 30x15x2.0 | 26" 28" | - |
| Jukka_2 | 61 | -21 | 24 | 14 | 14 | 140 | 19.7 | 41 | 80 | 5 | 30x15x2.0 | 24" 28" | - |
| Monty | 62 | -17 | 27 | 14 | 15 | 88 | 11 | 47 | 66 | - | 30x10x1.5 | 16" 16" | - |
| Jaculus | 62 | -20 | 28 | 17 | 17 | 138 | 13 | 37 | 71 | - | 30x15x2.0 | 27" 27" | 61 |
| Gerald 20 | 62 | -22 | 27 | 31 | 14 | 90 | 13.9 | 53 | - | 1.5 | 50x20 alloy | 20" 20" | 46 |
| pythoon | 62.5 | -17.5 | 31 | 17 | - | 162 | 18 | 49.5 | - | - | 30x10x1.5 | 20" 20" | - |
| Piko | 63 | -14 | 34 | 15 | 14 | 138 | 16 | 42 | 65 | - | 20-150 | 20" 26" | 61 |
| Marcel | 63 | -25.4 | 29 | 10 | 5 | 117 | 12 | - | - | - | 51x13x1.6 | 26" 16" | - |
| Serge | 63 | -27.4 | 28.5 | 25.5 | 10.4 | 125.3 | 16 | 40 | 74 | - | 13x1 10x1 | 26" 26" | - |
| Patrick | 64 | -26.5 | 34 | 12 | 13 | 120 | 15 | 40 | 73 | 2.5 | 40x10x2.0 | 26" 26" | 62 |
| Torben | 65 | -27 | 29 | 21.5 | 17 | 134 | 13.5 | 38 | 77 | 7 | 30x10x1.5 | 27" 27" | - |
| Worm | 65 | -28 | 20 | 29 | 12 | 128 | 16 | 38.5 | 69.5 | 4.2 | 30x20x2.0 | 26" 26" | - |
| Elias | 67 | -21 | 21 | 18 | 19 | 138 | 13.4 | 36 | 35 | - | 16x1.25 13x1 | 26" 26" | - |
| P4 | 67 | -24 | 20 | 23 | 12 | 113.5 | 14 | 34 | 63.5 | 4 | 40x10x1.5 | 24" 24" | - |
| P1 | 67 | -27 | 31 | 19 | 7 | 129 | 19.8 | 38 | 70 | 6 | 30x20x1.5 | 26" 26" | 63 |
| P3 | 67 | -27 | 30 | 21 | 15 | 129 | 19.8 | 41.5 | 73.5 | 5 | 40x10x1.5 | 26" 26" | 63 |
| 42 | 67 | -27.6 | 24.5 | 29.5 | 11.5 | 138 | 18.7 | 40 | 79 | - | 40x10x1.5 | 26" 26" | - |
| jmaier | 67 | -31 | 40 | 5 | - | 120 | 15 | 42 | - | - | - | 27" 27" | - |
| Gabriel | 68 | -29 | 28 | 18 | 16 | 130.5 | 15 | 38 | 72 | - | 40x10x1.5 | 26" 26" | - |
| P2 | 68 | - | 29 | 17 | - | 127 | 16.5 | 42 | 75 | - | 30x20x1.5 | 26" 28" | - |
| BHP | 68 | - | 34 | 9 | 7.6 | 107 | 16 | - | - | - | 51x13x1.6 | 26" 20" | - |
| Laurent | 69 | -30 | 20 | 26.5 | 11 | 114.5 | 13 | 37 | 72.5 | 2.5 | 35x20x1.5 | 26" 26" | 58 |
| Ray | 70 | -28.5 | 40 | 7 | - | 109 | 16 | - | - | 6 | - | 26" 26" | - |
| Gert | 71 | 30 | 29 | - | 12 | 130 | 19 | - | - | - | 35x15x1.5oval | 26" 26" | - |
| Sucuri | - | - | - | - | - | - | - | - | - | - | 30x20x0.9 | 26" 26" | - |
 |
stokidRoll-out 2011-10Follower of the pythoon |
 |
Gerald 20Roll-out 2011-02Alloy frame |
 |
MartinRoll-out 2009-12-022011-02-14 Mileage 3.500 km |
 |
PatrickRoll-out 2011-02 |
 |
pythoonRoll-out 2010-04 |
 |
EliasRoll-out 2010-03 |
 |
GertRoll-out 2009-09 |
 |
PikoRoll-out 2008-08First Hungarian Python |
 |
SergeRoll-out 2007-072009-09-07 Mileage 2.561 km Max Speed 65.7 km/h |
 |
MikeRoll-out 2007-07 |
 |
JaculusRoll-out 2007-04-032007-09 Mileage 100 km |
 |
42Roll-out 2006-12-15 (42 hours building time)Z-Frame by Stephan Schöling |
 |
Gavin KattsRoll-out 2006-10-01First South African Python |
 |
Thorsten BormRoll-out 2006-04-2212 mm rod-end bearings 2006-10-10 Mileage 500 km |
 |
Ghislain 2Roll-out 2006-03-30Aluminium frame 2007-08 mileage 5.000 km |
 |
NobuoRoll-out 2006-02-08 |
 |
Jukka 2Roll-out 2005-11-18 |
 |
PajtonRoll-out 2005-11-14 |
 |
PC2Roll-out 2005-10-06 |
 |
GabrielRoll-out 2005-06-152009-09-07 Mileage 26.000 km |
 |
Ghislain 1Roll-out 2005-05 |
 |
MontyRoll-out 2005-04-292006-10-10 Mileage 1.000 km |
 |
RayRoll-out 2005-04 |
 |
LaurentRoll-out 2005-02-05 |
 |
MarcelRoll-out 2005-01-13 |
 |
BHPRoll-out 2005-01-05 (20 hours building time) |
 |
DirkRoll-out 2004-12-012009-09-16 Mileage 30.000 km Max Speed 67 km/h |
 |
WormRoll-out 2004-11-17 (14 hours building time) |
 |
Jukka 1Roll-out 2004-11 |
 |
P4Roll-out 2004-08-02 (30 hours building time)2007-09-20 Mileage 3.000 km |
 |
Jürgen MaierRoll-out 2004-07 |
 |
TorbenRoll-out 2004-06-14 |
 |
P3Roll-out 2004-04-22 (40 hours building time)2009-09-07 Mileage 26.000 km Max Speed 50 km/h |
 |
SucuriRoll-out 2004-04-01 |
 |
P2Roll-out 2004-02-04 (41 hours building time) |
 |
P1Roll-out 2003-02-24 (60 hours building time)2009-09-07 Mileage 12.000 km Max Speed 50 km/h |
{kind=link}
{kind=link}
{kind=link}
.JPG){kind=link}
{kind=link}
{kind=link}
.JPG){kind=link}
{kind=link}
{kind=link}
Pivot Angle
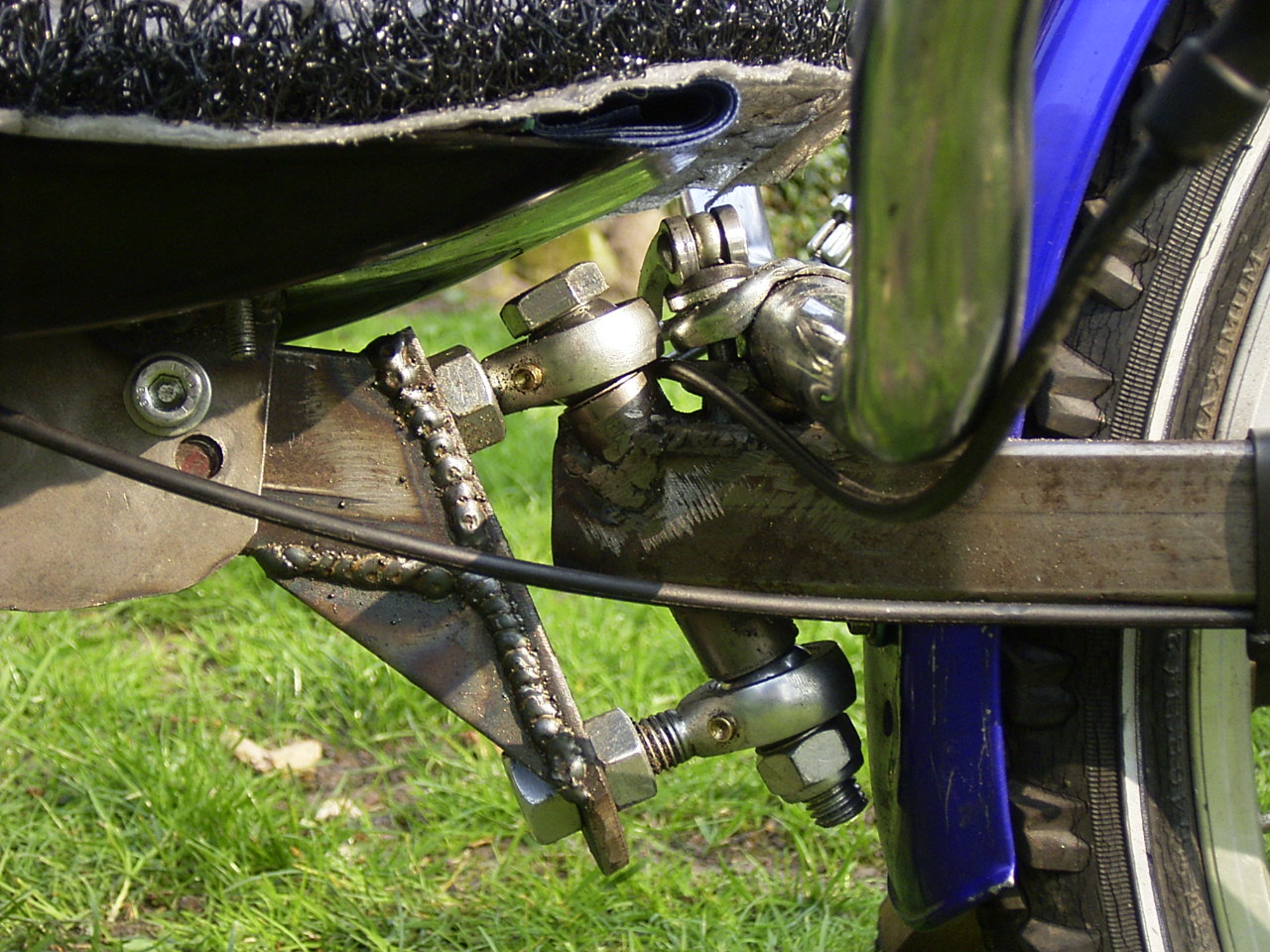
The angle of the steering pivot should be around 60 degrees. Angles bigger than 70 deg. will make the bike nervous, whereas very shallow angles result in increased wheel flop and huge turning circles (This was the major drawback of former center-steered lowracers with positive trail).
Trail
Before you raise any objection against the negative trail of the pythons, have a look at Frame Geometry Page.The destabilizing effect that NT normally has on dynamic bike behaviour is satisfactorily compensated by the "hanging pendulum" effect and gyro forces.
Seat Height
The seat height is measured at the lowest point of the seat. When building the python, ensure that you can reach the ground with both hands. Riding this bike is only half the fun when you cannot reach the ground. E.g. I never have to unclip my shoes when stopping.
BB-Seat Diff.
An important value for the efficiency of the pedalling force and the air drag. For very racy riders, values around 35 cm are ok. For moderate riders 22 cm are good.
Ground Clearance
One problem of the P1 was its low ground clearance of 7 cm. Especially when riding over curbstones or roots it regularly hit the ground. All later versions have better clearance. 10 cm is the minimum I would recommend for daily usability. If you ride a lot in the cities and offroad then it should be 15 cm.
Wheelbase
The WB should be as short as possible for a small turning circle. Limiting factors are the seat angle and the travel of the rear suspension.
Weight
Of course, the lesser the better. But stability and stiffness of the frame should not suffer.
BB-FWA
The distance between bottom bracket and the front wheel axle is crucial for the chainline. Try to achieve values bigger than 40 cm. If you are below 40, then better use smaller wheels or shorter cranks. For the sake of a maximized BB-FWA, the distance FWA-steering pivot should be minimized.
BB-EOS
This is the distance between the bottom bracket and the front edge of the seat. This measurement corresponds to the rider´s inseam length. As a rough calculation I use inseam minus 13 cm (for 170 mm cranks).
Turning Circle
Just a theoretical value. The TC is twice the turning radius. To measure the TC, push the bike around with the maximum steering angle and mark off the resulting track. Then measure the diameter of this circle. Most probably a left turn has a different TC than a right turn, depending on what part of the front frame collides first with the middle frame. If so, the average TC is taken.
Front Tubing
Box tubing of 40 x 10 x 1.5 mm is a good choice. It has the same width as the bottom bracket and is narrow enough to fit in the small space between the tire and the chainwheel.Easier to get is 30 x 10 x 1.5 mm tubing. Initially I doubted its stability, but several pythons use it without complaints so far.
Wheel Size
Front wheel and rear wheel.
CG
The position of the Center of Gravity relative to front and rear wheel, or the steering pivot might be important for the python´s dynamic stability. To determine the CG, place the front wheel on a scale and place the rear wheel on some books to obtain equal height. Then sit on the bike in your riding position and beg another person to read the scale. Then calculate the percentage of weight on the front wheel.Home